Are you sure you want to delete this task? Once this task is deleted, it cannot be recovered.
You can not select more than 25 topics
Topics must start with a chinese character,a letter or number, can include dashes ('-') and can be up to 35 characters long.
 Federico Pizarro Bejarano
7ddb35b095
Federico Pizarro Bejarano
7ddb35b095
|
3 months ago | |
|---|---|---|
| .github/workflows | 3 months ago | |
| examples | 3 months ago | |
| figures | 1 year ago | |
| safe_control_gym | 3 months ago | |
| tests | 3 months ago | |
| .gitignore | 1 year ago | |
| .pre-commit-config.yaml | 3 months ago | |
| CITATION.cff | 2 years ago | |
| LICENSE | 2 years ago | |
| README.md | 11 months ago | |
| pyproject.toml | 6 months ago | |
| setup.py | 6 months ago | |
README.md
safe-control-gym
Physics-based CartPole and Quadrotor Gym environments (using PyBullet) with symbolic a priori dynamics (using CasADi) for learning-based control, and model-free and model-based reinforcement learning (RL).
These environments include (and evaluate) symbolic safety constraints and implement input, parameter, and dynamics disturbances to test the robustness and generalizability of control approaches. [PDF]

@article{brunke2021safe,
title={Safe Learning in Robotics: From Learning-Based Control to Safe Reinforcement Learning},
author={Lukas Brunke and Melissa Greeff and Adam W. Hall and Zhaocong Yuan and Siqi Zhou and Jacopo Panerati and Angela P. Schoellig},
journal = {Annual Review of Control, Robotics, and Autonomous Systems},
year={2021},
url = {https://arxiv.org/abs/2108.06266}}
To reproduce the results in the article, see branch ar.
@misc{yuan2021safecontrolgym,
title={safe-control-gym: a Unified Benchmark Suite for Safe Learning-based Control and Reinforcement Learning},
author={Zhaocong Yuan and Adam W. Hall and Siqi Zhou and Lukas Brunke and Melissa Greeff and Jacopo Panerati and Angela P. Schoellig},
year={2021},
eprint={2109.06325},
archivePrefix={arXiv},
primaryClass={cs.RO}}
To reproduce the results in the article, see branch submission.
Install on Ubuntu/macOS
Clone repo
git clone https://github.com/utiasDSL/safe-control-gym.git
cd safe-control-gym
(optional) Create a conda environment
Create and access a Python 3.10 environment using
conda
conda create -n safe python=3.10
conda activate safe
Install
Install the safe-control-gym repository
pip install --upgrade pip
pip install -e .
Note
You may need to separately install gmp, a dependency of pycddlib:
conda install -c anaconda gmp
or
sudo apt-get install libgmp-dev
Architecture
Overview of safe-control-gym's API:

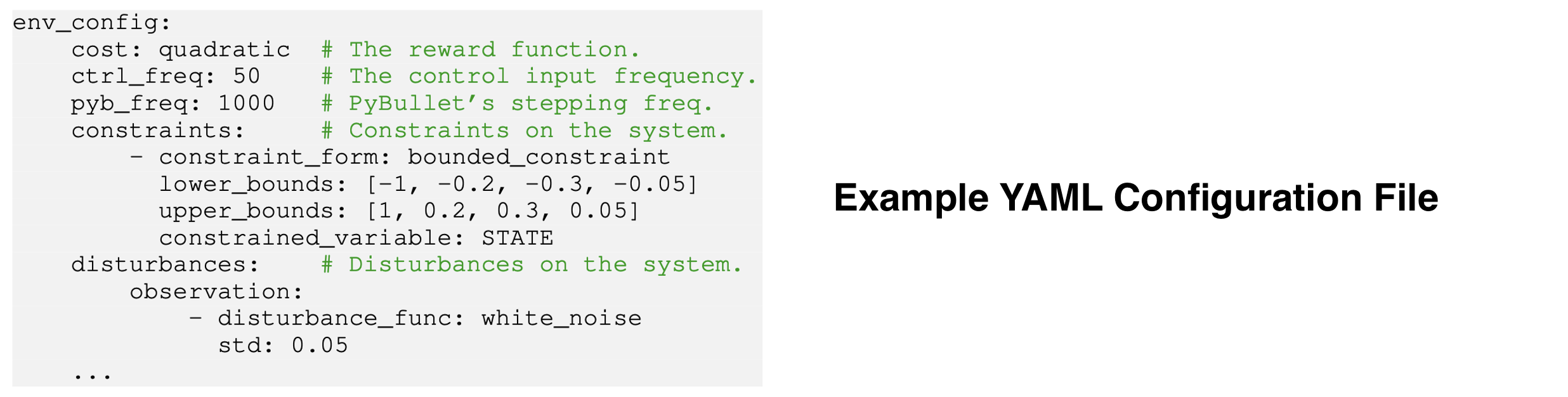
Configuration
Getting Started
Familiarize with APIs and environments with the scripts in examples/
3D Quadrotor Lemniscate Trajectory Tracking with PID
cd ./examples/ # Navigate to the examples folder
python3 pid/pid_experiment.py \
--algo pid \
--task quadrotor \
--overrides \
./pid/config_overrides/quadrotor_3D/quadrotor_3D_tracking.yaml


Cartpole Stabilization with LQR
cd ./examples/ # Navigate to the examples folder
python3 lqr/lqr_experiment.py \
--algo lqr \
--task cartpole \
--overrides \
./lqr/config_overrides/cartpole/cartpole_stabilization.yaml \
./lqr/config_overrides/cartpole/lqr_cartpole_stabilization.yaml
2D Quadrotor Trajectory Tracking with PPO
cd ./examples/rl/ # Navigate to the RL examples folder
python3 rl_experiment.py \
--algo ppo \
--task quadrotor \
--overrides \
./config_overrides/quadrotor_2D/quadrotor_2D_track.yaml \
./config_overrides/quadrotor_2D/ppo_quadrotor_2D.yaml \
--kv_overrides \
algo_config.training=False
Verbose API Example
cd ./examples/ # Navigate to the examples folder
python3 no_controller/verbose_api.py \
--task cartpole \
--overrides no_controller/verbose_api.yaml

List of Implemented Controllers
List of Implemented Safety Filters
Performance
We compare the sample efficiency of safe-control-gym with the original OpenAI Cartpole and PyBullet Gym's Inverted Pendulum, as well as gym-pybullet-drones.
We choose the default physic simulation integration step of each project.
We report performance results for open-loop, random action inputs.
Note that the Bullet engine frequency reported for safe-control-gym is typically much finer grained for improved fidelity.
safe-control-gym quadrotor environment is not as light-weight as gym-pybullet-drones but provides the same order of magnitude speed-up and several more safety features/symbolic models.
| Environment | GUI | Control Freq. | PyBullet Freq. | Constraints & Disturbances^ | Speed-Up^^ |
|---|---|---|---|---|---|
| Gym cartpole | True | 50Hz | N/A | No | 1.16x |
| InvPenPyBulletEnv | False | 60Hz | 60Hz | No | 158.29x |
| cartpole | True | 50Hz | 50Hz | No | 0.85x |
| cartpole | False | 50Hz | 1000Hz | No | 24.73x |
| cartpole | False | 50Hz | 1000Hz | Yes | 22.39x |
| gym-pyb-drones | True | 48Hz | 240Hz | No | 2.43x |
| gym-pyb-drones | False | 50Hz | 1000Hz | No | 21.50x |
| quadrotor | True | 60Hz | 240Hz | No | 0.74x |
| quadrotor | False | 50Hz | 1000Hz | No | 9.28x |
| quadrotor | False | 50Hz | 1000Hz | Yes | 7.62x |
^ Whether the environment includes a default set of constraints and disturbances
^^ Speed-up = Elapsed Simulation Time / Elapsed Wall Clock Time; on a 2.30GHz Quad-Core i7-1068NG7 with 32GB 3733MHz LPDDR4X; no GPU
Run Tests and Linting
Tests can be run locally by executing:
python3 -m pytest ./tests/ # Run all tests
Linting can be run locally with:
pre-commit install # Install the pre-commit hooks
pre-commit autoupdate # Auto-update the version of the hooks
pre-commit run --all # Run the hooks on all files
References
- Brunke, L., Greeff, M., Hall, A. W., Yuan, Z., Zhou, S., Panerati, J., & Schoellig, A. P. (2022). Safe learning in robotics: From learning-based control to safe reinforcement learning. Annual Review of Control, Robotics, and Autonomous Systems, 5, 411-444.
- Yuan, Z., Hall, A. W., Zhou, S., Brunke, L., Greeff, M., Panerati, J., & Schoellig, A. P. (2022). safe-control-gym: A unified benchmark suite for safe learning-based control and reinforcement learning in robotics. IEEE Robotics and Automation Letters, 7(4), 11142-11149.
Related Open-source Projects
gym-pybullet-drones: single and multi-quadrotor environmentsstable-baselines3: PyTorch reinforcement learning algorithmsbullet3: multi-physics simulation enginegym: OpenAI reinforcement learning toolkitcasadi: symbolic framework for numeric optimizationsafety-gym: environments for safe exploration in RLrealworldrl_suite: real-world RL challenge frameworkgym-marl-reconnaissance: multi-agent heterogeneous (UAV/UGV) environments
University of Toronto's Dynamic Systems Lab / Vector Institute for Artificial Intelligence
No Description
Wavefront Object Python COLLADA
Contributors (17)
federico.pizarrobejarano@mail.utoronto.ca
jacopo.panerati@utoronto.ca
catherine.glossop@vectorinstitute.ai
adam.wes.hall@gmail.com
jacopo.panerati@robotics.utias.utoronto.ca
justin.zcyuan@gmail.com
catherine.glossop@mail.utoronto.ca
amritk@vectorinstitute.ai
jakob.thumm@web.de
jakob.thumm@in.tum.de
siqi.zhou@robotics.utias.utoronto.ca
pizarrob@q.vectorinstitute.ai
lukas.brunke@tu-harburg.de
97563291+catgloss@users.noreply.github.com
melissa.greeff@mail.utoronto.ca
pizarrob@v2.cluster.local
pizarrob@v3.cluster.local