Are you sure you want to delete this task? Once this task is deleted, it cannot be recovered.
You can not select more than 25 topics
Topics must start with a chinese character,a letter or number, can include dashes ('-') and can be up to 35 characters long.
 chenzomi
24c9001cf8
chenzomi
24c9001cf8
|
1 year ago | |
|---|---|---|
| .. | ||
| code | 1 year ago | |
| images | 1 year ago | |
| README.md | 1 year ago | |
README.md
Yolov3网络实现目标检测
实验介绍
本实验主要介绍使用MindSpore开发和训练Yolov3模型。本实验实现了目标检测(人、脸、口罩)。
实验目的
- 掌握Yolov3模型的基本结构和编程方法。
- 掌握使用Yolov3模型进行目标检测。
- 了解MindSpore的model_zoo模块,以及如何使用model_zoo中的模型。
预备知识
- 熟练使用Python,了解Shell及Linux操作系统基本知识。
- 具备一定的深度学习和机器学习理论知识,如NMT、resnet网络、损失函数、优化器,训练策略、Checkpoint等。
- 了解华为云的基本使用方法,包括OBS(对象存储)、ModelArts(AI开发平台)、训练作业等功能。华为云官网:https://www.huaweicloud.com
- 了解并熟悉MindSpore AI计算框架,MindSpore官网:https://www.mindspore.cn/
实验环境
- MindSpore 1.0.0(MindSpore版本会定期更新,本指导也会定期刷新,与版本配套);
- 华为云ModelArts(控制台左上角选择“华北-北京四”):ModelArts是华为云提供的面向开发者的一站式AI开发平台,集成了昇腾AI处理器资源池,用户可以在该平台下体验MindSpore。
实验准备
创建OBS桶
本实验需要使用华为云OBS存储脚本和数据集,可以参考快速通过OBS控制台上传下载文件了解使用OBS创建桶、上传文件、下载文件的使用方法。
提示: 华为云新用户使用OBS时通常需要创建和配置“访问密钥”,可以在使用OBS时根据提示完成创建和配置。也可以参考获取访问密钥并完成ModelArts全局配置获取并配置访问密钥。
打开OBS控制台,点击右上角的“创建桶”按钮进入桶配置页面,创建OBS桶的参考配置如下:
- 区域:华北-北京四
- 数据冗余存储策略:单AZ存储
- 桶名称:如ms-course
- 存储类别:标准存储
- 桶策略:公共读
- 归档数据直读:关闭
- 企业项目、标签等配置:免
数据集准备
从这里下载目标检测所需要的数据集。文件说明如下所示:
- train: 训练数据集.
- *.jpg: 训练集图片
- *.xml:训练集标签
- test: 测试数据集.
- *.jpg: 测试集图片
数据集包含三类,分别为:人(person),脸(face)、口罩(mask)
脚本准备
从课程gitee仓库上下载本实验相关脚本。
上传文件
点击新建的OBS桶名,再打开“对象”标签页,通过“上传对象”、“新建文件夹”等功能,将脚本和数据集上传到OBS桶中,组织为如下形式:
yolov3
└── data
│ ├── train
│ └── test
└── code
└── 脚本等文件
实验步骤
代码梳理
代码文件说明:
- main.ipynb:训练和测试入口文件;
- config.py:配置文件;
- yolov3.py : yolov3网络定义文件;
- dataset.py: 数据预处理文件;
- utils.py: 工具类文件;
实验流程:
- 修改main.ipynb 训练cell参数并运行,得到模型文件。
- 修改main.ipynb 测试cell参数并运行,得到可视化结果。
数据预处理(dataset.py)
数据预处理包括:
- 原始数据格式整理,将原始图片和xml标签处理为mindrecord格式
- mindrecord格式数据处理,将mindrecord格式的原始数据处理为网络需要的数据特征。
原始数据格式处理(dataset.py / data_to_mindrecord_byte_image)
前面已经介绍原始数据*.jpg为图像数据,图像尺寸不固定。*.xml:训练集标签为标签数据,里面包含了框和框的类别。
*.xml标签数据解析如下所示:
图片描述:包括图片路径(folder)、名字(filename)
<?xml version="1.0"?>
-<annotation>
<folder>02-03_video01_frames</folder>
<filename>02-02_video12-frame-00249.jpg</filename>
<path>D:\EI Projects\1 项目交流\园区 未戴口罩识别\戴口罩监控视频\02-03\02-03_video01_frames\02-02_video12-frame-00249.jpg</path>
-<source>
<database>Unknown</database>
</source>
图片尺寸:包括图片宽度(width)、高度(height)、通道数(depth)
-<size>
<width>1920</width>
<height>1080</height>
<depth>3</depth>
</size>
物体框:包括名字(name)、姿势(pose)、是否被截断(truncated)、是否为难样本(difficult)、框(bndbox)
- 其中框字段中包含左下角x坐标(xmin)、左下角y坐标(ymin)、左上角x坐标(xmax)、左上角y坐标(ymax)
- 其中名字(name)可选项为:人(person)、脸(face)、带口罩(mask)
<segmented>0</segmented>
-<object>
<name>person</name>
<pose>Unspecified</pose>
<truncated>0</truncated>
<difficult>0</difficult>
-<bndbox>
<xmin>335</xmin>
<ymin>402</ymin>
<xmax>587</xmax>
<ymax>615</ymax>
</bndbox>
</object>
dataset.py中data_to_mindrecord_byte_image函数将原始数据处理为mindrecord格式。字段解析如下所示:
image: 原始图片annotation: 标签,numpy格式,维度:N*5,其中N代表哦框数。5分别表示: [xmin,ymin,xmax,ymax,class]file: 图像文件名,为后期可视化存储原始图。
其中标签annotation获取方式如下所示:
for i in all_files:
if (i[-3:]=='jpg' or i[-4:]=='jpeg') and i not in image_dict:
image_files.append(i)
label=[]
xml_path = os.path.join(image_dir,i[:-3]+'xml')
if not os.path.exists(xml_path):
label=[[0,0,0,0,0]]
image_dict[i]=label
continue
DOMTree = xml.dom.minidom.parse(xml_path)
collection = DOMTree.documentElement
# 在集合中获取所有框
object_ = collection.getElementsByTagName("object")
for m in object_:
temp=[]
name = m.getElementsByTagName('name')[0]
class_num = label_id[name.childNodes[0].data]
bndbox = m.getElementsByTagName('bndbox')[0]
xmin = xy_local(bndbox,'xmin')
ymin = xy_local(bndbox,'ymin')
xmax = xy_local(bndbox,'xmax')
ymax = xy_local(bndbox,'ymax')
temp.append(int(xmin))
temp.append(int(ymin))
temp.append(int(xmax))
temp.append(int(ymax))
temp.append(class_num)
label.append(temp)
image_dict[i]=label
mindrecord数据处理(dataset.py / create_yolo_dataset)
mindrecord数据预处理过程如下所示,参考dataset.py / preprocess_fn
- 图片和框裁剪和resize到网络设定输入图片尺寸([352,640])得到images
- 求框和锚点之间的iou值,将框和锚点对应。
- 将框、可信度、类别对应在网格中,得到bbox_1、gt_box2、bbox_3。
- 将网格中框单独拿出来,得到gt_box1、gt_box2、gt_box3。
注意:
- 本实验一张图片最多框数量设定为50,故最多可以保存50个框。
- 本实验网格采用大( $ 32 \times 32 $ )、中( $ 16 \times 16 $ )、小( $ 8 \times 8 $ )网格。选取9组锚点,其中包括3个大框、3个中框、3个小框。3个大框锚点采用大网格映射,3个中框采用中网格映射,3个小框采用小网格映射。
- 训练图片进行了增强。增强方式包括:随机裁剪噪声、翻转、扭曲。
图片和框resize
本实验将图片都统一为[352,640]进行训练和推理。
测试图片改变尺寸使用传统的先裁剪后resize方式,在保证图片不失真的情况下改变图片尺寸。具体做法如下所示,参考dataset.py / _infer_data。
w, h = img_data.size
input_h, input_w = input_shape
scale = min(float(input_w) / float(w), float(input_h) / float(h))
nw = int(w * scale)
nh = int(h * scale)
img_data = img_data.resize((nw, nh), Image.BICUBIC)
new_image = np.zeros((input_h, input_w, 3), np.float32)
new_image.fill(128)
img_data = np.array(img_data)
if len(img_data.shape) == 2:
img_data = np.expand_dims(img_data, axis=-1)
img_data = np.concatenate([img_data, img_data, img_data], axis=-1)
dh = int((input_h - nh) / 2)
dw = int((input_w - nw) / 2)
new_image[dh:(nh + dh), dw:(nw + dw), :] = img_data
new_image /= 255.
new_image = np.transpose(new_image, (2, 0, 1))
new_image = np.expand_dims(new_image, 0)
解析:
- 变量scale为真实边和设定边([352,640])的最小比例。为了保证图片不失真,长宽采取相同的放缩比例。
- 将图片resize为(nw, nh)后,预设定图片尺寸([352,640])不同,需要进行填充。填充采用两边填充。即将resize后的(nw, nh)大小图片放在([352,640])中间,两边填充像素值128。
- 测试框不需要做任何处理。
训练图片改变尺寸在传统的先裁剪后resize方式的基础上添加了随机噪声。使图片在失真范围内带有更多的原始图片信息。具体做法如下所示,参考dataset.py / _data_aug。
iw, ih = image.size
h, w = image_size
while True:
# Prevent the situation that all boxes are eliminated
new_ar = float(w) / float(h) * _rand(1 - jitter, 1 + jitter) / \
_rand(1 - jitter, 1 + jitter)
scale = _rand(0.25, 2)
if new_ar < 1:
nh = int(scale * h)
nw = int(nh * new_ar)
else:
nw = int(scale * w)
nh = int(nw / new_ar)
dx = int(_rand(0, w - nw))
dy = int(_rand(0, h - nh))
if len(box) >= 1:
t_box = box.copy()
np.random.shuffle(t_box)
t_box[:, [0, 2]] = t_box[:, [0, 2]] * float(nw) / float(iw) + dx
t_box[:, [1, 3]] = t_box[:, [1, 3]] * float(nh) / float(ih) + dy
if flip:
t_box[:, [0, 2]] = w - t_box[:, [2, 0]]
t_box[:, 0:2][t_box[:, 0:2] < 0] = 0
t_box[:, 2][t_box[:, 2] > w] = w
t_box[:, 3][t_box[:, 3] > h] = h
box_w = t_box[:, 2] - t_box[:, 0]
box_h = t_box[:, 3] - t_box[:, 1]
t_box = t_box[np.logical_and(box_w > 1, box_h > 1)] # discard invalid box
if len(t_box) >= 1:
box = t_box
break
box_data[:len(box)] = box
# resize image
image = image.resize((nw, nh), Image.BICUBIC)
# place image
new_image = Image.new('RGB', (w, h), (128, 128, 128))
new_image.paste(image, (dx, dy))
image = new_image
解析:
- 变量h,w为设定图片大小([352,640]),变量iw, ih为原始图片大小。
- 变量scale为尺度的意思,在(0.25,2)比例尺度范围内获取多尺度特征。得到新的图片大小nh或者nw,nh和nw想不与h,w带有不同尺度特征。
- 变量jitter控制随机噪声大小。变量new_ar定义如下所示,在宽高比$\frac{float(w)}{float(h)}$的基础上乘以一个1左右的随机数。随机数为$\frac{\_rand(1 - jitter, 1 + jitter)}{\_rand(1 - jitter, 1 + jitter)}$。通过改变new_ar从而改变resize后的图片大小(nw, nh)。带有噪声的图片(nw, nh)在一定范围内失真,失真比例由jitter控制
$$
new\_ar = \frac{float(w)}{float(h)} \times\frac{\_rand(1 - jitter, 1 + jitter)}{\_rand(1 - jitter, 1 + jitter)}
$$
- 变量dx和dy代表噪声大小。
- 对图片和框进行相同的resize操作。
- 操作方式为将大小为(nw, nh)的图片填充到(w,h)的dx,dy位置。其他位置用128填充。
- box_data维度为[50,5],其中50代表每张图片最多框数设定。5代表[xmin,ymin,xmax,ymax,class] 。通过修改config.py文件的nms_max_num大小,可以修改最大框数量。但是最大框数量必须比所有真实数据图片的最大框数大,否则制作数据集过程会引文box数量过多报错。
- 得到的变量images为预处理结果,可以直接输入网络训练。得到的变量box_data需要进一步传入函数_preprocess_true_boxes中进行锚点和网格映射,集体参考下一步框预处理。
训练框预处理(框、锚点、网格映射,bbox计算)
num_layers = anchors.shape[0] // 3
anchor_mask = [[6, 7, 8], [3, 4, 5], [0, 1, 2]]
true_boxes = np.array(true_boxes, dtype='float32')
input_shape = np.array(in_shape, dtype='int32')
boxes_xy = (true_boxes[..., 0:2] + true_boxes[..., 2:4]) // 2.
boxes_wh = true_boxes[..., 2:4] - true_boxes[..., 0:2]
true_boxes[..., 0:2] = boxes_xy / input_shape[::-1]
true_boxes[..., 2:4] = boxes_wh / input_shape[::-1]
grid_shapes = [input_shape // 32, input_shape // 16, input_shape // 8]
y_true = [np.zeros((grid_shapes[l][0], grid_shapes[l][1], len(anchor_mask[l]),
5 + num_classes), dtype='float32') for l in range(num_layers)]
anchors = np.expand_dims(anchors, 0)
anchors_max = anchors / 2.
anchors_min = -anchors_max
valid_mask = boxes_wh[..., 0] >= 1
wh = boxes_wh[valid_mask]
if len(wh) >= 1:
wh = np.expand_dims(wh, -2)
boxes_max = wh / 2.
boxes_min = -boxes_max
intersect_min = np.maximum(boxes_min, anchors_min)
intersect_max = np.minimum(boxes_max, anchors_max)
intersect_wh = np.maximum(intersect_max - intersect_min, 0.)
intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1]
box_area = wh[..., 0] * wh[..., 1]
anchor_area = anchors[..., 0] * anchors[..., 1]
iou = intersect_area / (box_area + anchor_area - intersect_area)
best_anchor = np.argmax(iou, axis=-1)
for t, n in enumerate(best_anchor):
for l in range(num_layers):
if n in anchor_mask[l]:
i = np.floor(true_boxes[t, 0] * grid_shapes[l][1]).astype('int32')
j = np.floor(true_boxes[t, 1] * grid_shapes[l][0]).astype('int32')
k = anchor_mask[l].index(n)
c = true_boxes[t, 4].astype('int32')
y_true[l][j, i, k, 0:4] = true_boxes[t, 0:4]
y_true[l][j, i, k, 4] = 1.
y_true[l][j, i, k, 5 + c] = 1.
解析:
- true_boxes为上一步结果box_data,具体请参照上一个解析。
- num_layers为锚点层数,本实验,将锚点分为三个层次。分别为大框,中框,小框。
- anchor_mask为锚点编号。config.py中的anchor_scales为锚点。根据标签框的大小来设定。
- boxes_xy代表框的中心点坐标,boxes_wh代表框的宽高。
- grid_shapes为网格,其中包含大网格(大框使用),中网格(中框使用),小网格(小框使用)。大框尺寸为 $ 32 \times 32 $ ,中框尺寸为 $16 \times 16$ ,小框尺寸为 $8 \times 8$ 。网格维度分别为大框[11,20] ,中框[22,40] ,小框[44,80](注: $ 11 = \frac{352}{32} $ $ 20 = \frac{640}{32} $ $ 22 = \frac{640}{16} $ $ 40 = \frac{640}{16} $ $ 44 = \frac{352}{8} $ $ 80 = \frac{640}{8} $ )
- y_true为已经映射到锚点、网格的框。y_true[0]为大框映射,维度为[11, 20, 3, 8] ,y_true[1]为中框映射,维度为[22, 40, 3, 8] , y_true[2]为小框映射,维度为[44, 80, 3, 8] 。 第2个维度3代表每个层次有几个框。本实验大框、中框、小框层都是有三个框对应。第3个维度8代表标签值,分别代表[boxes_xy,boxes_wh, Confidence(置信度),class(one-hot值,person、face、mask)]
- 映射方式如下所示。
框映射到锚点和网格流程如下:
- 将输入boxes_xy和boxes_wh的值放缩到0-1范围内。
true_boxes[..., 0:2] = boxes_xy / input_shape[::-1]
true_boxes[..., 2:4] = boxes_wh / input_shape[::-1]
- 将锚点中心点放缩到(0,0)点,并扩展维度。最后得到anchors_max和anchors_min维度为[1,9,2],其中 anchors_min 代表框中心点放缩到(0,0)点以后的左下角坐标。anchors_max 代表框中心点放缩到(0,0)点以后的右上角坐标。
anchors = np.expand_dims(anchors, 0)
anchors_max = anchors / 2.
anchors_min = -anchors_max
- 将boxes_wh中心点放缩到(0,0点),并扩展维度。最后得到boxes_max和boxes_min维度为[num_box,1,2]。其中 boxes_min 代表框中心点放缩到(0,0)点以后的左下角坐标。boxes_max 代表框中心点放缩到0-1以后的右上角坐标。
valid_mask = boxes_wh[..., 0] >= 1
wh = boxes_wh[valid_mask]
wh = np.expand_dims(wh, -2)
boxes_max = wh / 2.
boxes_min = -boxes_max
- 分别求每个框和9个锚点的交集宽和高。具体求法为:
- 计算 anchors_min 和anchors_min的最大值 intersect_min,intersect_min为交集左下角坐标
- 计算 anchors_max 和 boxes_max 的最小值 intersect_max, intersect_max为交集右上角坐标
- 计算交集宽高为:intersect_wh = intersect_max - intersect_min
intersect_min = np.maximum(boxes_min, anchors_min)
intersect_max = np.minimum(boxes_max, anchors_max)
intersect_wh = np.maximum(intersect_max - intersect_min, 0.)
5、分别求每个框和9个锚点的iou值。iou为交并比。其中交集面积为intersect_area,并集面积为(box_area + anchor_area - intersect_area)。iou维度为[num_box, 9],其中9代表9个锚点
intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1]
box_area = wh[..., 0] * wh[..., 1]
anchor_area = anchors[..., 0] * anchors[..., 1]
iou = intersect_area / (box_area + anchor_area - intersect_area)
6、对于每个框,选出最大iou值对应的锚点编号。
best_anchor = np.argmax(iou, axis=-1)
7、将true_boxes映射到锚点编号、网格中。其中y_true的解析参考前面解析。y_true即数据预处理结果bbox_1、bbox_2、bbox_3。矩阵数据范围为0-1(参考步骤1放缩)。
解析: 将锚点和真实框放缩到(0,1)的目标是保证其中心点统一。锚点是没有中心点的。所有网格点都有锚点。这种放缩可以快速定位目标框属于哪个锚点(网格化以后的锚点,以小尺度为例子有 $ 11 \times 20 \times 3 $ 个锚点)。
for t, n in enumerate(best_anchor):
for l in range(num_layers):
if n in anchor_mask[l]:
i = np.floor(true_boxes[t, 0] * grid_shapes[l][1]).astype('int32')
j = np.floor(true_boxes[t, 1] * grid_shapes[l][0]).astype('int32')
k = anchor_mask[l].index(n)
c = true_boxes[t, 4].astype('int32')
y_true[l][j, i, k, 0:4] = true_boxes[t, 0:4]
y_true[l][j, i, k, 4] = 1.
y_true[l][j, i, k, 5 + c] = 1.
框预处理(框、锚点、网格映射,gt_box 计算)
gt_box 维度为[50,4],存放了所有的y_true中的框,忽略网格和锚点信息。gt_box 即数据预处理结果gt_box1、gt_box2、gt_box3。矩阵数据范围为0-1。
mask0 = np.reshape(y_true[0][..., 4:5], [-1])
gt_box0 = np.reshape(y_true[0][..., 0:4], [-1, 4])
gt_box0 = gt_box0[mask0 == 1]
pad_gt_box0[:gt_box0.shape[0]] = gt_box0
mask1 = np.reshape(y_true[1][..., 4:5], [-1])
gt_box1 = np.reshape(y_true[1][..., 0:4], [-1, 4])
gt_box1 = gt_box1[mask1 == 1]
pad_gt_box1[:gt_box1.shape[0]] = gt_box1
mask2 = np.reshape(y_true[2][..., 4:5], [-1])
gt_box2 = np.reshape(y_true[2][..., 0:4], [-1, 4])
gt_box2 = gt_box2[mask2 == 1]
pad_gt_box2[:gt_box2.shape[0]] = gt_box2
预处理结果展示
数据预处理结果可以直接用于训练和推理。预处理结果解析如下所示。
网络训练输入数据(训练预处理结果)解析:
| 名称 | 维度 | 描述 |
|---|---|---|
| images | (32, 3, 352, 640) | 图片[batch_size,channel,weight,height] |
| bbox_1 | (11, 20, 3, 8) | 大框在大尺度(32*32)映射 [grid_big,grid_big,num_big,label] |
| bbox_2 | (22, 40, 3, 8) | 中框在中尺度(16*16)映射 [grid_middle,grid_big,num_middle,label] |
| bbox_3 | (44, 80, 3, 8) | 小框在小尺度(8*8)映射 [grid_small,grid_small,num_small,label] |
| gt_box1 | (50, 4) | 大框 |
| gt_box2 | (50, 4) | 中框 |
| gt_box3 | (50, 4) | 小框 |
网络测试输入数据(测试预处理结果)解析:
| 名称 | 维度及说明 |
|---|---|
| images | 图片:(1, 3, 352, 640) |
| shape | 图片尺寸,例如:( 720 1280) |
| anno | 真实框[xmin,ymin,xmax,ymax] |
yolov3训练网络结构
yolov3网络结构如下所示:
- class YoloWithLossCell(x, y_true_0, y_true_1, y_true_2, gt_0, gt_1, gt_2)
#----------------------------yolov3网络------------------------------------
- class yolov3_resnet18(x)
#------------------------特征提取---------------------------------
- class YOLOv3
- class ResNet -> feature_map1, feature_map2, feature_map3
- class YoloBlock(feature_map3) -> con1, big_object_output
- def _conv_bn_relu(con1) ->con1
- P.ResizeNearestNeighbor(con1) ->ups1 # upsample1
- P.Concat((ups1, feature_map2)) -> con1
- class YoloBlock(con1) -> con2, medium_object_output
- def _conv_bn_relu(con2) ->con2
- P.ResizeNearestNeighbor(con2) ->ups2 # upsample2
- P.Concat((ups2, feature_map1)) -> con3
- class YoloBlock(con3) -> _, small_object_output
- return big_object_output,medium_object_output,small_object_output
#--------------------检测--------------------------------
- class DetectionBlock('l', self.config)(big_object_output)
- 略,详见后续检测部分。
- if self.training:
return grid, prediction, box_xy, box_wh
return box_xy, box_wh, box_confidence, box_probs
- class DetectionBlock('m', self.config)(medium_object_output)
- 略
- class DetectionBlock('s', self.config)(small_object_output)
- 略
#----------------------loss计算-----------------------------------
- class YoloLossBlock('l', self.config)
- 详见loss计算
- class YoloLossBlock('m', self.config)
- 略
- class YoloLossBlock('s', self.config)
- 略
特征提取(class YOLOv3)
特征提取是yolov3网络的第一步,本实验使用resnet网络提取特征,分别提取到特征feature_map1、feature_map2、feature_map3。然后使用卷积网络和上采样将特征和锚点对应。得到big_object_output、medium_object_output、small_object_output。参考yolov3.py文件中的class YOLOv3等。
输入输出变量分析:
| 名称 | 维度 | 描述 |
|---|---|---|
| 输入:x | (32, 3, 352, 640) | 网络输入图片[batch_size,channel,weight,height] |
| resnet输出:feature_map1 | (32, 128, 44, 80) | 大尺度特征[batch_size, backbone_shape[2], h/8, w/8] |
| resnet输出:feature_map2 | (32, 256, 22, 40) | 中尺度特征 [batch_size, backbone_shape[3], h/16, w/16] |
| resnet输出:feature_map3 | (32, 512, 11, 20) | 小尺度特征[batch_size, backbone_shape[4], h/32, w/32] |
| 输出:big_object_output | (32, 24, 11, 20) | 输出小尺度特征[batch_size, out_channel, h/32, w/32] |
| 输出:medium_object_output | (32, 24, 22, 40) | 输出中尺度特征 [batch_size, out_channel, h/16, w/16] |
| 输出:small_object_output | (32, 24, 44, 80) | 输出大尺度特征[batch_size, out_channel, h/8, w/8] |
解析: 本实验 out_channel=24,计算方式为: $out\_ channel= \frac{len(anchor\_ scales) }{3} \times (num\_classes + 5)$
这里的num_classes代表8个标签,分别为4个位置信息:框的中心点坐标和框的长宽;一个置信度:框的概率;类别信息:共三类。$out\_channel = \frac{len(anchor\_scales) }{3}$
代表每种尺度锚点个数,本实验每种尺度包含3个锚点。
检测(class DetectionBlock)
检测网络的目标是从上面的特征中提取有用的框。参考class DetectionBlock。
训练网络返回值为: grid, prediction, box_xy, box_wh。
- 变量grid为网格;
- 变量prediction为预测值,但是并非绝对预测值。而是相对值。此预测中心点坐标为相对于其所在网格左上角的偏移坐标;此预测网格宽高值为相对于其对应的锚点的偏移坐标。即:prediction与网格和锚点对应。
- 变量box_xy为预测中心点坐标,为prediction转换后的绝对坐标
- 变量box_wh为预测宽高。为prediction转换后的绝对坐标。
测试网络返回值为:box_xy, box_wh, box_confidence, box_probs
- 变量box_xy为预测中心点坐标,为绝对坐标;
- 变量box_wh为预测宽高。为绝对坐标;
- 变量box_confidence为预测框置信度;
- 变量box_probs为预测框类别;
上面为检测网络输出介绍。检测网络的输入为特征提取网络的输出,前面已经介绍。下表为检测网络输出维度说明。(以小尺度为例)
| 名称 | 维度 | 描述 |
|---|---|---|
| grid | (1, 1,11, 20, 1, 1) | 网格,这里网格进行了转置[w/32, h/32] |
| prediction | (32, 11,20, 3, 8) | 预测相对结果。[batch_size, h/32, w/32, num_anchors_per_scale, num_attrib] |
| box_xy | (32, 11,20, 3, 2) | 预测中心点绝对坐标。[batch_size, h/32, w/32, num_anchors_per_scale, num_attrib] |
| box_wh | (32, 11,20, 3, 2) | 预测宽高绝对宽高。[batch_size, h/32, w/32, num_anchors_per_scale, num_attrib] |
| box_confidence | (32, 11,20, 3, 1) | 预测绝对置信度。[batch_size, h/32, w/32, num_anchors_per_scale, num_attrib] |
| box_probs | (32, 11,20, 3, 3) | 预测绝对类别。[batch_size, h/32, w/32, num_anchors_per_scale, num_attrib] |
我们假设偏移量prediction各分量为:$t_x$ 、$t_y$ 、$t_w$ 、$t_h $ 、$ t_{confidence} $、$ t_{probs}$。分别为:中心点相对于所在网格左上角偏移量$t_x$ 、$t_y$ , 宽高相对于锚点偏移量$t_w$ 、$t_h$,置信度和类别为$ t_{confidence} $、$ t_{probs}$;假设预测框绝对值为:$b_x$ 、$b_y$ 、$b_w$ 、$b_h$、$ b_{confidence} $、$ b_{probs}$,分别为:中心点坐标$b_x$ 、$b_y$ , 宽高$b_w$ 、$b_h$,置信度和类别为$ b_{confidence} $、$ b_{probs}$;假设网格点:$c_x$ 、$c_y$; 假设锚点宽高为$p_w$ 、$p_h$。相对量(或偏移量)和绝对量之间的转换公式如下公式所示,参考图片如下图所示。
$$
b_x = \sigma( t_x ) + c_x
$$
$$
b_y = \sigma( t_y ) + c_y
$$
$$
b_w = p_w * e^{t_w}
$$
$$
b_h = p_h * e^{t_h}
$$
$$
b_{confidence} = \sigma( t_{confidence} )
$$
$$
b_{probs} = \sigma( t_{probs} )
$$
解析:
其中$\sigma$为sigmoid函数,确保偏移量在(0,1)范围内。添加这样的转换主要是因为在训练时如果没有将和压缩到(0,1)区间内的话,模型在训练前期很难收敛。
- 我们设定的锚点只有宽高,没有中心点,算法默认所有网格都有这些锚点,且中心点为网格左上角坐标。以小尺度为例,共有锚点 $ 11 \times 20 \times 3 $ 个。
- 计算得到的相对坐标(prediction)每个网格中都有3个(小尺度),中心点为每个网格的左上角坐标。
- ($c_x$、$c_y$)为所有网格的左上角坐标。并非(0,0)点。
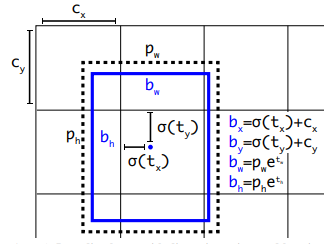
[1] 图片来源 https://pjreddie.com/media/files/papers/YOLOv3.pdf
具体实现代表如下所示:
box_xy = prediction[:, :, :, :, :2]
box_wh = prediction[:, :, :, :, 2:4]
box_confidence = prediction[:, :, :, :, 4:5]
box_probs = prediction[:, :, :, :, 5:]
box_xy = (self.sigmoid(box_xy) + grid) / P.Cast()(F.tuple_to_array((grid_size[1], grid_size[0])), ms.float32)
box_wh = P.Exp()(box_wh) * self.anchors / self.input_shape
box_confidence = self.sigmoid(box_confidence)
box_probs = self.sigmoid(box_probs)
loss计算(class YoloLossBlock)
yolov3实验loss计算,主要使用偏移量prediction计算。旨在让网络预测值的与目标值的偏移最小。输入为预测值和真实值,输出为loss值。输入:grid, prediction, pred_xy(上表中box_xy), pred_wh(上表中box_wh), y_true, gt_box。(详细介绍请查找上面的表格),输出为loss。
yolob3的loss由多部分相加组成。loss包含:
- 中心点loss—— xy_loss(交叉熵);
- 宽高loss—— wh_loss(l2损失);
- 置信度loss—— confidence_loss(真阳性+真阴性);
- 分类loss—— class_loss(交叉熵);
我们假设偏移量prediction各分量为:$t\_xy$、$t\_wh$ 、 $t\_confidence$ 、 $t\_probs$。假设真实值bbox(前面预处理结果展示标题下的表格)各分量为:$true\_xy$、$true\_wh$ 、$true\_confidence$、 $true\_probs$。计算方式如下所示。
$xy\_loss = true\_confidence \times(2 - true\_w \times true\_h )\times cross\_entropy(t\_xy, true\_xy \times grid\_shape - grid)$
$wh\_loss = true\_confidence \times(2 - true\_w \times true\_h )\times \frac{1}{2} |t\_wh - (true\_wh \times grid\_shape - grid) | ^2 $
$cross\_con = cross\_entropy(t\_confidence, true\_confidence)$
$confidence\_loss = true\_confidence \times cross\_con + (1 - true\_confidence) \times cross\_con \times ignore\_mask$
$class\_loss = object\_mask \times cross\_entropy( t\_probs, true\_probs)$
解析:
- 公式$xy\_loss$、$wh\_loss$ 中的 $(2 - true\_w \times true\_h )$ 是为了弱化边界框尺寸对损失值的影响,该值为1-2。
- ignore_mask为求得的 的忽略框mask。阈值见config.py文件中的ignore_threshold。计算方式如下所示:
- 计算pred_boxes(预测值,非偏移。看代码)和gt_box的iou值。
- 比较这些iou值与ignore_threshold值大小。结果为ignore_mask
- ignore_mask mask的框为不好的,去除框。梯度不进行更新。
loss计算核心代码如下所示,请参照代码阅读前面的文字,这样可以加深理解。
object_mask = y_true[:, :, :, :, 4:5]
class_probs = y_true[:, :, :, :, 5:]
grid_shape = P.Shape()(prediction)[1:3]
grid_shape = P.Cast()(F.tuple_to_array(grid_shape[::-1]), ms.float32)
pred_boxes = self.concat((pred_xy, pred_wh))
true_xy = y_true[:, :, :, :, :2] * grid_shape - grid
true_wh = y_true[:, :, :, :, 2:4]
true_wh = P.Select()(P.Equal()(true_wh, 0.0),
P.Fill()(P.DType()(true_wh), P.Shape()(true_wh), 1.0),
true_wh)
true_wh = P.Log()(true_wh / self.anchors * self.input_shape)
box_loss_scale = 2 - y_true[:, :, :, :, 2:3] * y_true[:, :, :, :, 3:4]
gt_shape = P.Shape()(gt_box)
gt_box = P.Reshape()(gt_box, (gt_shape[0], 1, 1, 1, gt_shape[1], gt_shape[2]))
iou = self.iou(P.ExpandDims()(pred_boxes, -2), gt_box) # [batch, grid[0], grid[1], num_anchor, num_gt]
best_iou = self.reduce_max(iou, -1) # [batch, grid[0], grid[1], num_anchor]
ignore_mask = best_iou < self.ignore_threshold
ignore_mask = P.Cast()(ignore_mask, ms.float32)
ignore_mask = P.ExpandDims()(ignore_mask, -1)
ignore_mask = F.stop_gradient(ignore_mask)
xy_loss = object_mask * box_loss_scale * self.cross_entropy(prediction[:, :, :, :, :2], true_xy)
wh_loss = object_mask * box_loss_scale * 0.5 * P.Square()(true_wh - prediction[:, :, :, :, 2:4])
confidence_loss = self.cross_entropy(prediction[:, :, :, :, 4:5], object_mask)
confidence_loss = object_mask * confidence_loss + (1 - object_mask) * confidence_loss * ignore_mask
class_loss = object_mask * self.cross_entropy(prediction[:, :, :, :, 5:], class_probs)
yolov3验证网络结构
- class YoloWithEval
- class yolov3_resnet18 #特征提取(略,同训练)
- 见训练(略)
- class YoloBoxScores # 框反映射和分数计算
前面已经提到测试网络的yolov3_resnet18返回值为:box_xy, box_wh, box_confidence, box_probs。这里不再介绍,请参考前面小标题检测部分。
框反映射和分数计算(class YoloBoxScores)
在数据预处理部分,为了统一尺度我们将image和box都映射到尺度为[352,640]的空间中。为了得到原始图片中框的大小,需要对yolov3_resnet18求得的框进行反映射。得到结果同原始数据格式处理中annotation。class YoloBoxScores的输出结果为:box和boxes_scores。
box、boxes_scores介绍如下所示(以小尺度为例):
| 名称 | 维度 | 描述 |
|---|---|---|
| box | (32, $ 11 \times 20 \times 3 $ ,4) | 预测框,共 $ 11 \times 20 \times 3 $ 个,每个框由四个标签,[xmin,ymin,xmax,ymax] |
| boxes_scores | (32, $ 11 \times 20 \times 3 $ ,3) | 预测框分数(3个类别),共 $ 11 \times 20 \times 3 $ 个框,每个框由3个分数。 |
解析:
- 上表中的32代表batch_size 。
- 此Yolov3网络共可以得到13860个框。是三个尺度框数的总和:
$$
13860 = 11 \times 20 \times 3 + 22 \times 40 \times 3 + 44 \times 80 \times 3
$$
- 分数为框的分数和类别分数的成绩,即:boxes_scores = box_confidence * box_probs 。
yolov3推理
yolov推理需要从前面得到的13860个框中得到我们需要的有用框。具体做法如下所示,见(main.py中tobox函数)。其中从众多框中选择有效框算法为nms算法,见utils.py文件中的apply_nm函数。
def tobox(boxes, box_scores):
"""Calculate precision and recall of predicted bboxes."""
config = ConfigYOLOV3ResNet18()
num_classes = config.num_classes
mask = box_scores >= config.obj_threshold
boxes_ = []
scores_ = []
classes_ = []
max_boxes = config.nms_max_num
for c in range(num_classes):
class_boxes = np.reshape(boxes, [-1, 4])[np.reshape(mask[:, c], [-1])]
class_box_scores = np.reshape(box_scores[:, c], [-1])[np.reshape(mask[:, c], [-1])]
nms_index = apply_nms(class_boxes, class_box_scores, config.nms_threshold, max_boxes)
#nms_index = apply_nms(class_boxes, class_box_scores, 0.5, max_boxes)
class_boxes = class_boxes[nms_index]
class_box_scores = class_box_scores[nms_index]
classes = np.ones_like(class_box_scores, 'int32') * c
boxes_.append(class_boxes)
scores_.append(class_box_scores)
classes_.append(classes)
boxes = np.concatenate(boxes_, axis=0)
classes = np.concatenate(classes_, axis=0)
scores = np.concatenate(scores_, axis=0)
return boxes, classes, scores
非极大值抑制NMS算法
由于滑动窗口,同一个class可能有好几个框(每一个框都带有一个分类器得分),我们的目的就是要去除冗余的检测框,保留最好的一个。于是我们就要用到非极大值抑制,来抑制那些冗余的框: 抑制的过程是一个迭代-遍历-消除的过程。
- 将person类别所有框的得分排序,选中最高分及其对应的框A:
- 遍历其余的框,如果和当前最高分框A的重叠面积(IOU)大于一定阈值,我们就将框删除。
- 从剩下的person类别框中继续选一个得分最高的(非A,A已经确定),重复上述过程,指导找到所有满足与之的person类别框。
- 重复上述过程,找到所有满足条件的facce类别框和mask类别框。

[2] 图片来源: https://www.cnblogs.com/makefile/p/nms.html
参数设定
网络参数设定(src/config.py):
class ConfigYOLOV3ResNet18:
"""
Config parameters for YOLOv3.
Examples:
ConfigYoloV3ResNet18.
"""
img_shape = [352, 640]
feature_shape = [32, 3, 352, 640]
num_classes = 3
nms_max_num = 50
_NUM_BOXES = 50
backbone_input_shape = [64, 64, 128, 256]
backbone_shape = [64, 128, 256, 512]
backbone_layers = [2, 2, 2, 2]
backbone_stride = [1, 2, 2, 2]
ignore_threshold = 0.5
obj_threshold = 0.3
nms_threshold = 0.4
anchor_scales = [(5,3),(10, 13), (16, 30),(33, 23),(30, 61),(62, 45),(59, 119),(116, 90),(156, 198)]
out_channel = int(len(anchor_scales) / 3 * (num_classes + 5))
train.py / cfg
cfg = edict({
"distribute": False,
"device_id": 0,
"device_num": 1,
"dataset_sink_mode": True,
"lr": 0.001,
"epoch_size": 60,
"batch_size": 32,
"loss_scale" : 1024,
"pre_trained": None,
"pre_trained_epoch_size":0,
"ckpt_dir": "./ckpt",
"save_checkpoint_epochs" :1,
'keep_checkpoint_max': 1,
"data_url": 's3://yyq-2/DATA/code/yolov3/mask_detection_500',
"train_url": 's3://yyq-2/DATA/code/yolov3/yolov3_out/',
})
实验结果
训练日志
Start create dataset!
Create Mindrecord.
Create Mindrecord Done, at ./data/mindrecord/train
The epoch size: 15
Create dataset done!
Start train YOLOv3, the first epoch will be slower because of the graph compilation.
epoch: 10 step: 15, loss is 215.95618
epoch: 20 step: 15, loss is 147.80356
epoch: 30 step: 15, loss is 106.00204
epoch: 40 step: 15, loss is 101.95938
epoch: 50 step: 15, loss is 70.30449
epoch: 60 step: 15, loss is 63.806183
推理结果
推理日志如下所示:
Create Mindrecord.
Create Mindrecord Done, at ./data/mindrecord/test
Start Eval!
Load Checkpoint!
========================================
total images num: 8
Processing, please wait a moment.
取其中一张图片结果如下所示:

结论
本实验主要介绍使用MindSpore实现Yolov3网络,实现目标检测。分析原理和结果可得:
- Yolov3网络对目标检测任务有效。
- Yolov3网络对大目标检测比小目标检测结果好。
- Yolov3网络对于不同目标需要选取合适的anchor_scales值。
- Yolov3使用极大值抑制算法nms进行特征框选取。
- Yolov3网络使用灵活,不需要指定框个数,不同的图片可以预测得到不同个数的框。
MindSpore实验,仅用于教学或培训目的。配合MindSpore官网使用。 MindSpore experiments, for teaching or training purposes only. Use it together with the MindSpore official website.
CSV Jupyter Notebook Text Python Markdown other
Contributors (25+)
huawei_ci_bot@163.com
chenzhongming1@huawei.com
dongyonghan@huawei.com
 yangyaqin1@huawei.com
yangyaqin1@huawei.com
 zhengnengjin@huawei.com
yuanyujie@huawei.com
314202276@qq.com
xiaokehuang@foxmail.com
jingranxie@gmail.com
zhengnengjin@huawei.com
yuanyujie@huawei.com
314202276@qq.com
xiaokehuang@foxmail.com
jingranxie@gmail.com
 z17853805901@163.com
982457331@qq.com
z17853805901@163.com
982457331@qq.com
 1041634596@qq.com
hhz21@mails.tsinghua.edu.cn
10293547+chen-xiuzhu@user.noreply.gitee.com
chengmin_cui@163.com
weijian940330@gmail.com
yuxincao22@163.com
1067874054@qq.com
15521031278@163.com
liqc21@mails.tsinghua.edu.cn
1041634596@qq.com
hhz21@mails.tsinghua.edu.cn
10293547+chen-xiuzhu@user.noreply.gitee.com
chengmin_cui@163.com
weijian940330@gmail.com
yuxincao22@163.com
1067874054@qq.com
15521031278@163.com
liqc21@mails.tsinghua.edu.cn
yangyaqin1@huawei.com
zhengnengjin@huawei.com
yuanyujie@huawei.com
314202276@qq.com
xiaokehuang@foxmail.com
jingranxie@gmail.com
z17853805901@163.com
982457331@qq.com
1041634596@qq.com
hhz21@mails.tsinghua.edu.cn
10293547+chen-xiuzhu@user.noreply.gitee.com
chengmin_cui@163.com
weijian940330@gmail.com
yuxincao22@163.com
1067874054@qq.com
15521031278@163.com
liqc21@mails.tsinghua.edu.cn