
English | 简体中文
YOLOv6
Implementation of paper:
What's New
- [2023.01.06] Release P6 models and enhance the performance of P5 models. ⭐️ Benchmark
- Renew the neck of the detector with a BiC module and SimCSPSPPF Block.
- Propose an anchor-aided training (AAT) strategy.
- Involve a new self-distillation strategy for small models of YOLOv6.
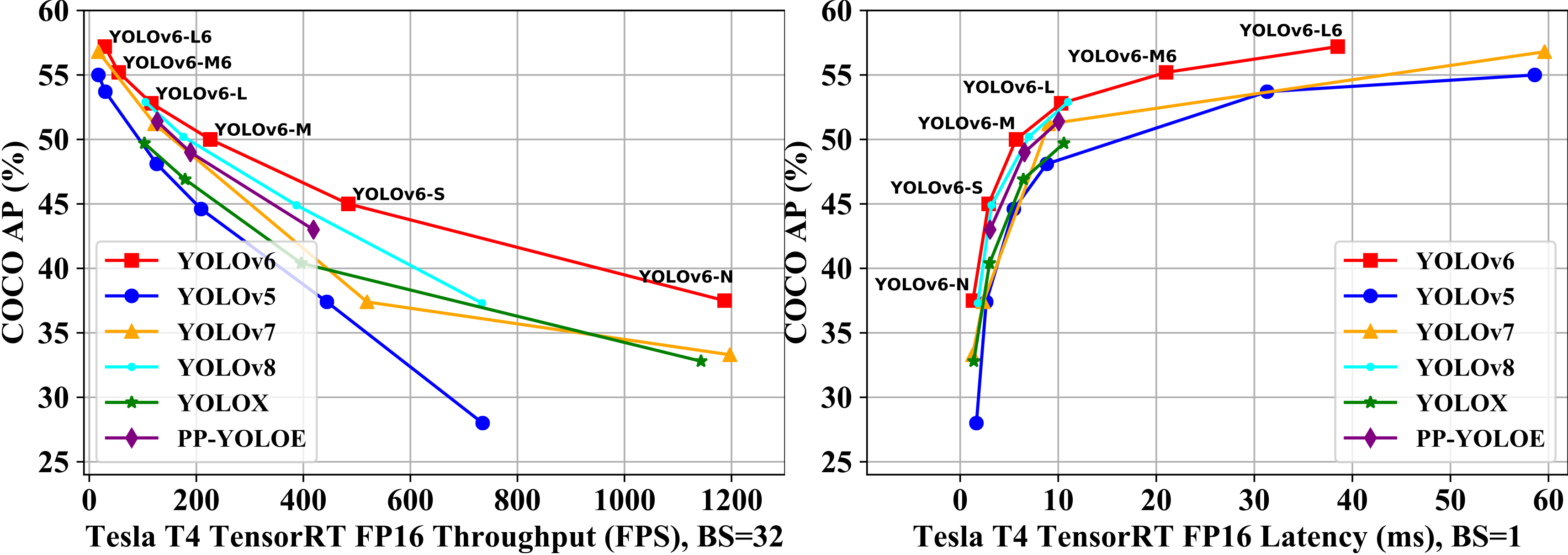
- Expand YOLOv6 and hit a new
SOTA performance on the COCO dataset.
- [2022.11.04] Release base models to simplify the training and deployment process.
- [2022.09.06] Customized quantization methods. 🚀 Quantization Tutorial
- [2022.09.05] Release M/L models and update N/T/S models with enhanced performance.
- [2022.06.23] Release N/T/S models with excellent performance.
Benchmark
| Model |
Size |
mAPval
0.5:0.95 |
SpeedT4
trt fp16 b1
(fps) |
SpeedT4
trt fp16 b32
(fps) |
Params
(M) |
FLOPs
(G) |
| YOLOv6-N |
640 |
37.5 |
779 |
1187 |
4.7 |
11.4 |
| YOLOv6-S |
640 |
45.0 |
339 |
484 |
18.5 |
45.3 |
| YOLOv6-M |
640 |
50.0 |
175 |
226 |
34.9 |
85.8 |
| YOLOv6-L |
640 |
52.8 |
98 |
116 |
59.6 |
150.7 |
|
|
|
|
|
|
|
| YOLOv6-N6 |
1280 |
44.9 |
228 |
281 |
10.4 |
49.8 |
| YOLOv6-S6 |
1280 |
50.3 |
98 |
108 |
41.4 |
198.0 |
| YOLOv6-M6 |
1280 |
55.2 |
47 |
55 |
79.6 |
379.5 |
| YOLOv6-L6 |
1280 |
57.2 |
26 |
29 |
140.4 |
673.4 |
Table Notes
- All checkpoints are trained with self-distillation except for YOLOv6-N6/S6 models trained to 300 epochs without distillation.
- Results of the mAP and speed are evaluated on COCO val2017 dataset with the input resolution of 640×640 for P5 models and 1280x1280 for P6 models.
- Speed is tested with TensorRT 7.2 on T4.
- Refer to Test speed tutorial to reproduce the speed results of YOLOv6.
- Params and FLOPs of YOLOv6 are estimated on deployed models.
Legacy models
| Model |
Size |
mAPval
0.5:0.95 |
SpeedT4
trt fp16 b1
(fps) |
SpeedT4
trt fp16 b32
(fps) |
Params
(M) |
FLOPs
(G) |
| YOLOv6-N |
640 |
35.9300e
36.3400e |
802 |
1234 |
4.3 |
11.1 |
| YOLOv6-T |
640 |
40.3300e
41.1400e |
449 |
659 |
15.0 |
36.7 |
| YOLOv6-S |
640 |
43.5300e
43.8400e |
358 |
495 |
17.2 |
44.2 |
| YOLOv6-M |
640 |
49.5 |
179 |
233 |
34.3 |
82.2 |
| YOLOv6-L-ReLU |
640 |
51.7 |
113 |
149 |
58.5 |
144.0 |
| YOLOv6-L |
640 |
52.5 |
98 |
121 |
58.5 |
144.0 |
- Speed is tested with TensorRT 7.2 on T4.
Quantized model 🚀
| Model |
Size |
Precision |
mAPval
0.5:0.95 |
SpeedT4
trt b1
(fps) |
SpeedT4
trt b32
(fps) |
| YOLOv6-N RepOpt |
640 |
INT8 |
34.8 |
1114 |
1828 |
| YOLOv6-N |
640 |
FP16 |
35.9 |
802 |
1234 |
| YOLOv6-T RepOpt |
640 |
INT8 |
39.8 |
741 |
1167 |
| YOLOv6-T |
640 |
FP16 |
40.3 |
449 |
659 |
| YOLOv6-S RepOpt |
640 |
INT8 |
43.3 |
619 |
924 |
| YOLOv6-S |
640 |
FP16 |
43.5 |
377 |
541 |
- Speed is tested with TensorRT 8.4 on T4.
- Precision is figured on models for 300 epochs.
Quick Start
Install
git clone https://github.com/meituan/YOLOv6
cd YOLOv6
pip install -r requirements.txt
Reproduce our results on COCO
Please refer to Train COCO Dataset.
Finetune on custom data
Single GPU
# P5 models
python tools/train.py --batch 32 --conf configs/yolov6s_finetune.py --data data/dataset.yaml --fuse_ab --device 0
# P6 models
python tools/train.py --batch 32 --conf configs/yolov6s6_finetune.py --data data/dataset.yaml --img 1280 --device 0
Multi GPUs (DDP mode recommended)
# P5 models
python -m torch.distributed.launch --nproc_per_node 8 tools/train.py --batch 256 --conf configs/yolov6s_finetune.py --data data/dataset.yaml --fuse_ab --device 0,1,2,3,4,5,6,7
# P6 models
python -m torch.distributed.launch --nproc_per_node 8 tools/train.py --batch 128 --conf configs/yolov6s6_finetune.py --data data/dataset.yaml --img 1280 --device 0,1,2,3,4,5,6,7
- fuse_ab: add anchor-based auxiliary branch and use Anchor Aided Training Mode (Not supported on P6 models currently)
- conf: select config file to specify network/optimizer/hyperparameters. We recommend to apply yolov6n/s/m/l_finetune.py when training on your custom dataset.
- data: prepare dataset and specify dataset paths in data.yaml ( COCO, YOLO format coco labels )
- make sure your dataset structure as follows:
├── coco
│ ├── annotations
│ │ ├── instances_train2017.json
│ │ └── instances_val2017.json
│ ├── images
│ │ ├── train2017
│ │ └── val2017
│ ├── labels
│ │ ├── train2017
│ │ ├── val2017
│ ├── LICENSE
│ ├── README.txt
Resume training
If your training process is corrupted, you can resume training by
# single GPU training.
python tools/train.py --resume
# multi GPU training.
python -m torch.distributed.launch --nproc_per_node 8 tools/train.py --resume
Above command will automatically find the latest checkpoint in YOLOv6 directory, then resume the training process.
Your can also specify a checkpoint path to --resume parameter by
# remember to replace /path/to/your/checkpoint/path to the checkpoint path which you want to resume training.
--resume /path/to/your/checkpoint/path
This will resume from the specific checkpoint you provide.
Evaluation
Reproduce mAP on COCO val2017 dataset with 640×640 or 1280x1280 resolution
# P5 models
python tools/eval.py --data data/coco.yaml --batch 32 --weights yolov6s.pt --task val --reproduce_640_eval
# P6 models
python tools/eval.py --data data/coco.yaml --batch 32 --weights yolov6s6.pt --task val --reproduce_640_eval --img 1280
- verbose: set True to print mAP of each classes.
- do_coco_metric: set True / False to enable / disable pycocotools evaluation method.
- do_pr_metric: set True / False to print or not to print the precision and recall metrics.
- config-file: specify a config file to define all the eval params, for example: yolov6n_with_eval_params.py
Inference
First, download a pretrained model from the YOLOv6 release or use your trained model to do inference.
Second, run inference with tools/infer.py
# P5 models
python tools/infer.py --weights yolov6s.pt --source img.jpg / imgdir / video.mp4
# P6 models
python tools/infer.py --weights yolov6s6.pt --img 1280 1280 --source img.jpg / imgdir / video.mp4
If you want to inference on local camera or web camera, you can run:
# P5 models
python tools/infer.py --weights yolov6s.pt --webcam --webcam-addr 0
# P6 models
python tools/infer.py --weights yolov6s6.pt --img 1280 1280 --webcam --webcam-addr 0
webcam-addr can be local camera number id or rtsp address.
Deployment
Tutorials
Third-party resources
If you have any questions, welcome to join our WeChat group to discuss and exchange.

English | 简体中文
YOLOv6
Implementation of paper:
What's New
- [2023.01.06] Release P6 models and enhance the performance of P5 models. ⭐️ Benchmark
- Renew the neck of the detector with a BiC module and SimCSPSPPF Block.
- Propose an anchor-aided training (AAT) strategy.
- Involve a new self-distillation strategy for small models of YOLOv6.
- Expand YOLOv6 and hit a new
SOTA performance on the COCO dataset.
- [2022.11.04] Release base models to simplify the training and deployment process.
- [2022.09.06] Customized quantization methods. 🚀 Quantization Tutorial
- [2022.09.05] Release M/L models and update N/T/S models with enhanced performance.
- [2022.06.23] Release N/T/S models with excellent performance.
Benchmark
| Model |
Size |
mAPval
0.5:0.95 |
SpeedT4
trt fp16 b1
(fps) |
SpeedT4
trt fp16 b32
(fps) |
Params
(M) |
FLOPs
(G) |
| YOLOv6-N |
640 |
37.5 |
779 |
1187 |
4.7 |
11.4 |
| YOLOv6-S |
640 |
45.0 |
339 |
484 |
18.5 |
45.3 |
| YOLOv6-M |
640 |
50.0 |
175 |
226 |
34.9 |
85.8 |
| YOLOv6-L |
640 |
52.8 |
98 |
116 |
59.6 |
150.7 |
|
|
|
|
|
|
|
| YOLOv6-N6 |
1280 |
44.9 |
228 |
281 |
10.4 |
49.8 |
| YOLOv6-S6 |
1280 |
50.3 |
98 |
108 |
41.4 |
198.0 |
| YOLOv6-M6 |
1280 |
55.2 |
47 |
55 |
79.6 |
379.5 |
| YOLOv6-L6 |
1280 |
57.2 |
26 |
29 |
140.4 |
673.4 |
Table Notes
- All checkpoints are trained with self-distillation except for YOLOv6-N6/S6 models trained to 300 epochs without distillation.
- Results of the mAP and speed are evaluated on COCO val2017 dataset with the input resolution of 640×640 for P5 models and 1280x1280 for P6 models.
- Speed is tested with TensorRT 7.2 on T4.
- Refer to Test speed tutorial to reproduce the speed results of YOLOv6.
- Params and FLOPs of YOLOv6 are estimated on deployed models.
Legacy models
| Model |
Size |
mAPval
0.5:0.95 |
SpeedT4
trt fp16 b1
(fps) |
SpeedT4
trt fp16 b32
(fps) |
Params
(M) |
FLOPs
(G) |
| YOLOv6-N |
640 |
35.9300e
36.3400e |
802 |
1234 |
4.3 |
11.1 |
| YOLOv6-T |
640 |
40.3300e
41.1400e |
449 |
659 |
15.0 |
36.7 |
| YOLOv6-S |
640 |
43.5300e
43.8400e |
358 |
495 |
17.2 |
44.2 |
| YOLOv6-M |
640 |
49.5 |
179 |
233 |
34.3 |
82.2 |
| YOLOv6-L-ReLU |
640 |
51.7 |
113 |
149 |
58.5 |
144.0 |
| YOLOv6-L |
640 |
52.5 |
98 |
121 |
58.5 |
144.0 |
- Speed is tested with TensorRT 7.2 on T4.
Quantized model 🚀
| Model |
Size |
Precision |
mAPval
0.5:0.95 |
SpeedT4
trt b1
(fps) |
SpeedT4
trt b32
(fps) |
| YOLOv6-N RepOpt |
640 |
INT8 |
34.8 |
1114 |
1828 |
| YOLOv6-N |
640 |
FP16 |
35.9 |
802 |
1234 |
| YOLOv6-T RepOpt |
640 |
INT8 |
39.8 |
741 |
1167 |
| YOLOv6-T |
640 |
FP16 |
40.3 |
449 |
659 |
| YOLOv6-S RepOpt |
640 |
INT8 |
43.3 |
619 |
924 |
| YOLOv6-S |
640 |
FP16 |
43.5 |
377 |
541 |
- Speed is tested with TensorRT 8.4 on T4.
- Precision is figured on models for 300 epochs.
Quick Start
Install
git clone https://github.com/meituan/YOLOv6
cd YOLOv6
pip install -r requirements.txt
Reproduce our results on COCO
Please refer to Train COCO Dataset.
Finetune on custom data
Single GPU
# P5 models
python tools/train.py --batch 32 --conf configs/yolov6s_finetune.py --data data/dataset.yaml --fuse_ab --device 0
# P6 models
python tools/train.py --batch 32 --conf configs/yolov6s6_finetune.py --data data/dataset.yaml --img 1280 --device 0
Multi GPUs (DDP mode recommended)
# P5 models
python -m torch.distributed.launch --nproc_per_node 8 tools/train.py --batch 256 --conf configs/yolov6s_finetune.py --data data/dataset.yaml --fuse_ab --device 0,1,2,3,4,5,6,7
# P6 models
python -m torch.distributed.launch --nproc_per_node 8 tools/train.py --batch 128 --conf configs/yolov6s6_finetune.py --data data/dataset.yaml --img 1280 --device 0,1,2,3,4,5,6,7
- fuse_ab: add anchor-based auxiliary branch and use Anchor Aided Training Mode (Not supported on P6 models currently)
- conf: select config file to specify network/optimizer/hyperparameters. We recommend to apply yolov6n/s/m/l_finetune.py when training on your custom dataset.
- data: prepare dataset and specify dataset paths in data.yaml ( COCO, YOLO format coco labels )
- make sure your dataset structure as follows:
├── coco
│ ├── annotations
│ │ ├── instances_train2017.json
│ │ └── instances_val2017.json
│ ├── images
│ │ ├── train2017
│ │ └── val2017
│ ├── labels
│ │ ├── train2017
│ │ ├── val2017
│ ├── LICENSE
│ ├── README.txt
Resume training
If your training process is corrupted, you can resume training by
# single GPU training.
python tools/train.py --resume
# multi GPU training.
python -m torch.distributed.launch --nproc_per_node 8 tools/train.py --resume
Above command will automatically find the latest checkpoint in YOLOv6 directory, then resume the training process.
Your can also specify a checkpoint path to --resume parameter by
# remember to replace /path/to/your/checkpoint/path to the checkpoint path which you want to resume training.
--resume /path/to/your/checkpoint/path
This will resume from the specific checkpoint you provide.
Evaluation
Reproduce mAP on COCO val2017 dataset with 640×640 or 1280x1280 resolution
# P5 models
python tools/eval.py --data data/coco.yaml --batch 32 --weights yolov6s.pt --task val --reproduce_640_eval
# P6 models
python tools/eval.py --data data/coco.yaml --batch 32 --weights yolov6s6.pt --task val --reproduce_640_eval --img 1280
- verbose: set True to print mAP of each classes.
- do_coco_metric: set True / False to enable / disable pycocotools evaluation method.
- do_pr_metric: set True / False to print or not to print the precision and recall metrics.
- config-file: specify a config file to define all the eval params, for example: yolov6n_with_eval_params.py
Inference
First, download a pretrained model from the YOLOv6 release or use your trained model to do inference.
Second, run inference with tools/infer.py
# P5 models
python tools/infer.py --weights yolov6s.pt --source img.jpg / imgdir / video.mp4
# P6 models
python tools/infer.py --weights yolov6s6.pt --img 1280 1280 --source img.jpg / imgdir / video.mp4
If you want to inference on local camera or web camera, you can run:
# P5 models
python tools/infer.py --weights yolov6s.pt --webcam --webcam-addr 0
# P6 models
python tools/infer.py --weights yolov6s6.pt --img 1280 1280 --webcam --webcam-addr 0
webcam-addr can be local camera number id or rtsp address.
Deployment
Tutorials
Third-party resources
If you have any questions, welcome to join our WeChat group to discuss and exchange.
