Are you sure you want to delete this task? Once this task is deleted, it cannot be recovered.
You can not select more than 25 topics
Topics must start with a chinese character,a letter or number, can include dashes ('-') and can be up to 35 characters long.
 ch_en
598c4452d2
ch_en
598c4452d2
|
1 week ago | |
|---|---|---|
| .idea | 1 year ago | |
| SpikeCV | 1 week ago | |
| docs | 3 months ago | |
| .gitignore | 1 year ago | |
| License.md | 1 year ago | |
| Publications.md | 5 months ago | |
| README.md | 6 months ago | |
| README_en.md | 1 year ago | |
| requirements.readthedocs.txt | 1 year ago | |
| requirements.txt | 1 year ago | |
| setup.py | 1 year ago | |
README.md
注意:目前是开发版本,部分用例尚未通过测试。
![]()
面向超高速脉冲相机的开源视觉框架 —— SpikeCV
”我们不仅提供锤子,还制造钉子,捕光制电,让我们打开前所未见的视觉新世界。 “
中文|English
SpikeCV具体文档地址为:https://spikecv.readthedocs.io
简介
脉冲相机
超高速脉冲相机模拟灵长类视网膜编码原理,每个像素位置直接根据光强变化独立发放脉冲。如下图(b)中显示,当光子累计达到预先设定好的阈值时就产生脉冲比特流,1表示发放脉冲,0表示无脉冲。与图(a)中展示的传统相机成像区别是,常见的数码相机按照一个较低的固定频率产生静止图片序列,无法有效记录光的高速变化过程,例如拍摄场景存在高速运动时,产生的图片会存在运动模糊。而脉冲相机目前可按照40KHZ的频率将光信号转化为脉冲比特流,记录的视觉时空变化较为完整,可应用超高速视觉场景的采集、表示、编码、检测、跟踪和识别等任务。
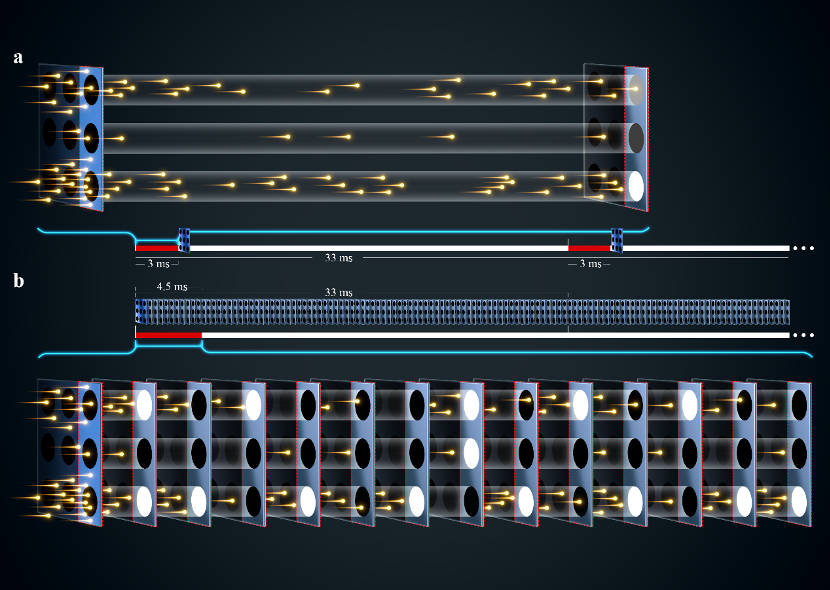
上图出自论文:Huang T, Zheng Y, Yu Z, et al. 1000× Faster Camera and Machine Vision with Ordinary Devices[J]. Engineering, 2022. 更多关于脉冲相机的细节请参考这篇文章。
SpikeCV 架构

如上图所示,SpikeCV主要包含三个部分:
- 脉冲相机数据集:
- Raw Spikes:由脉冲相机产生或模拟器生成的脉冲流
- HFR Videos:与脉冲流对应的高帧率视频流(High-Frame-Rate Videos, HFR),可用于检验基于脉冲相机的超高速场景重构算法
- Optical Flow:拍摄/模拟场景的光流信息
- Stero Depth:双目、单目脉冲相机拍摄场景的深度信息
- Object Labels:场景中物体的类别标签信息
- Bounding Boxes:表示运动/前景物体所在位置及大小的候选框,可用于检测、跟踪等任务
- 设备接口:提供脉冲相机驱动及配套的数据采集,实时脉冲数据处理接口。可支持用于目前已发行的脉冲相机作为输入,或使用离线文件进行模拟相机数据调试
- 模块库:
- SpkData:包含脉冲数据类SpikeStream,脉冲相机模拟器,与用于加载脉冲相机数据与脉冲流对应的标签数据(Ground Truth, GT),和模拟脉冲相机原理的脉冲生成
- SpkProc:面向脉冲相机的模型及算法,包含Filters滤波器、Reconstrution重构算法、OF Estimation光流估计、Depth Estimation深度估计、Deteciton 物体检测、Tracking多目标跟踪 和物体识别 等模块
- Tools:工具类接口,包含:
Visualization—— 脉冲流或各类视觉任务结果的可视化Metrics—— 各类视觉任务结果的定量评价指标Utils—— 辅助开发工具,例如数据路径处理等
安装说明
安装
建议使用Anaconda创建专属于 SpikeCV 的使用环境
# 从启智平台下载代码仓库
git clone https://git.openi.org.cn/Cordium/SpikeCV.git
cd SpikeCV
python setup.py install
数据集
SpikeCV 脚本的运行依赖于开源框架的数据集,因此请确保所执行任务对应的数据集下载成功,可通过网页下载或是通过命令行从指定的数据集链接下载,例如:
cd SpikeCV\SpkData\datasets
wget -c SpikeCV数据集的网页链接 -O | tar -xz
对于较大的数据集,建议直接从启智SpikeCV仓库的数据集地址下载,并将数据集文件夹解压缩到SpikeCV\SpkData\datasets 目录下。
目前已开源的数据集包括:
| 数据集名称 | 描述 | 样例 |
|---|---|---|
| recVidarReal2019 | 脉冲相机高速运动数据集。包括超高速运动物体(ClassA)和相机高速运动(ClassB)两类场景。 | 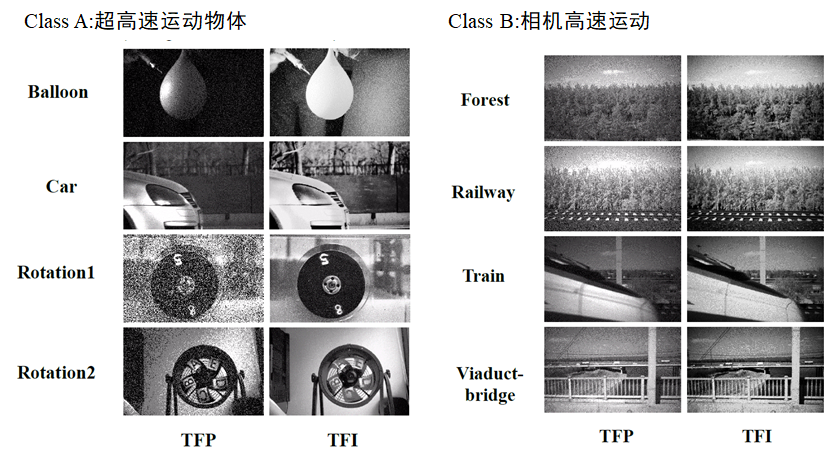 |
| motVidarReal2020 | 脉冲相机真实拍摄的多目标检测跟踪数据集,带有标签数据,可用于多目标运动物体的检测跟踪任务。 |  |
| momVidarReal2021 | Multi-Object-Motion 脉冲数据集:51段真实场景脉冲序列;提供多种物体运动模式和高速运行场景下的实拍Vidar脉冲流,种类丰富,速度较快;可用于脉冲图像重构、高速目标检测跟踪、运动分析(运动分割、光流估计)等任务。 | 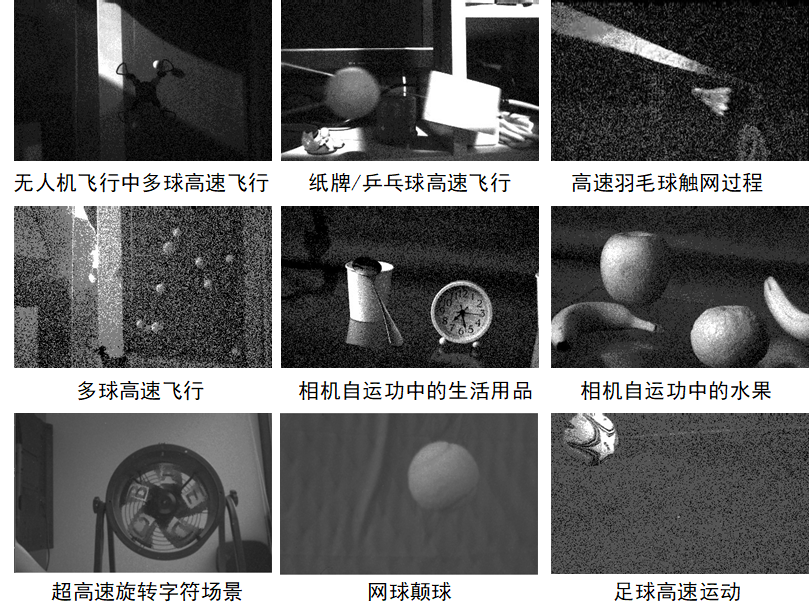 |
| OpticalFlowSPIFT | 模拟多种飞行物体Spike flything things (SPIFT)场景,带有高速移动目标的光流数据,可应用于高速场景重构、高速目标检测跟踪、运动分析等任务(如光流估计等)。 |  |
| OpticalFlowPHM | 模拟真实场景高速运动Photo-realistic High-speed Motion(PHM)场景,带有高速移动目标的光流数据,可应用于高速场景重构、高速目标检测跟踪、运动分析等任务(如光流估计等)。 |  |
| PKU-Vidar-DVS | 联合事件相机DVS和脉冲相机脉冲流的数据集,脉冲相机提供高速纹理采样,事件相机进行高速动态采样,提供12Meps的事件流, 25 Hz RGB图像(346 x 260)。该数据集提供候选框标注数据,可用于高速与极端光照场景下目标精准检测的任务。 |  |
| PKU-Spike-Stereo | 双目脉冲相机结合深度数据,提供脉冲流和ZED深度图,包含室内室外的高速运动场景,10类目标,887个深度标注图。 |  |
引用方式
@misc{SpikeCV,
title = {SpikeCV},
author = {Zheng, Yajing and Zhang, Jiyuan and Zhao Rui and Ding, Jianhao and Li, Jianing and Chen, Shiyan and Yu, Zhaofei, Huang, Tiejun and other contributors},
year = {2022},
howpublished = {\url{https://git.openi.org.cn/Cordium/SpikeCV.git}},
}
更多脉冲相机的相关文章请参见 Publications.md。
若有问题可通过以下邮箱进行咨询:
开源许可证
SpikeCV 开源项目是在Apache2.0许可证下授权的,请参考License.md查阅许可详情。
开发单位
SpikeCV是由北京大学视频与视觉技术国家工程研究中心牵头组织,脉冲视觉公司参与的开源项目。
脉冲视觉相关数据集、算法及硬件接口
Wavefront Object Python Text C++ C other





